







Az adatasszimiláció a modell kezdeti feltételeinek előállítását jelenti a légkör aktuális állapotát jellemző rendelkezésre álló információk figyelembevételével. A legfőbb rendelkezésre álló információk a meteorológiai megfigyelések és a háttér mező (a modell korábbi előrejelzése az aktuális kezdeti mező időpontjára vonatkozóan). A korszerű adatasszimilációs módszerek (pl. optimális interpoláció, variációs asszimiláció) a keresett kezdeti mezőt a megfigyelések és a háttérmező egy statisztikai értelemben vett optimális együtteseként állítják elő figyelembe véve azok megbízhatóságait (szintén statisztikai értelemben, azaz hiba kovariancia mátrixok formájában). Az adatasszimiláció regionális modellek esetében technikailag kiváltható egy globális vagy nagyobb területet lefedő regionális modell kezdeti feltételeinek interpolációjával. Azonban az ilyen interpolációval előálló kezdeti feltételek nem képesek megfelelően leírni az aktuális kis térségű (mezo skálájú) légköri rendszereket, hiszen a tényleges meteorológiai információ egy rosszabb felbontású rácsról származik, amely felbontása alatt az interpoláció csupán zajt generál. Fontos tehát, hogy a kezdeti mezőt közvetlenül a nagy felbontású rácson állítsuk elő, ami csak egy saját adatasszimilációs rendszerrel érhető el. Természetesen csak akkor nyerünk extra információt a nagy felbontású adatasszimilációval, ha a megfigyelő hálózat megközelítőleg hasonló sűrűségű, mint a modell felbontása. Ezért nagyon fontosak az adatasszimilációs rendszerek fejlesztésében az olyan irányú kutatások, amelyek az új megfigyelési technikák alkalmazását célozzák. Napjaink nagy felbontású adatasszimilációs rendszereiben a hagyományos felszíni és rádiószondás megfigyeléseken kívül repülőgépes, GPS, műholdas, wind-profiler és radar megfigyelések is felhasználhatók, amelyek nagy felbontásban detektálják a meteorológiai paraméterek értékeit. A fenti megfontolások alapján az Országos Meteorológiai Szolgálat nagy hangsúlyt fektet a regionális modelljeinek (ALADIN és AROME) lokális adatasszimilációs rendszereinek fejlesztésére.
ALADIN modell adatasszimilációs rendszere
Az adatasszimilációval kapcsolatos fejlesztés 2000 nyarán kezdődött a Szolgálatnál az ALADIN modell kezdeti feltételeinek javítása céljából. A felszíni és talaj változók kezdeti feltételeinek meghatározásához az optimális interpoláció, míg a légköri változók kezdeti értékeinek meghatározásához a (három-dimenziós) variációs asszimilációt (3d-var) választottuk módszertani alapul. Az első működő kutatási verzió 2001 nyarán futott napi rendszerességgel egy SGI Origin 2000 (16 processzor) számítógépen felszíni és rádiószondás adatok felhasználásával. A 2002–2005-ös időszakban a fejlesztés a felhasznált megfigyelési állomány bővítésével folytatódott (többféle műholdas megfigyelés, repülőgépes megfigyelések, wind profilerek beépítése). Az ALADIN modell lokális adatasszimilációs rendszere 2005 májusában vált operatív alkalmazássá, azaz olyan eszközzé, amely a napi előrejelzési gyakorlatban használatos és a végfelhasználók javára válik. Az operatív bevezetés óta a háttér mező hiba kovariancia mátrixának minél jobb becslésére, illetve a felhasznált megfigyelések további sűrítésére és szisztematikus hibáinak szűrésére fektettük a hangsúlyt, illetve kísérleteket végeztünk a 3d-var asszimiláció negyedik dimenzióra való (időbeli) kiterjesztésére is (4d-var, 3d-fgat). A jelenleg futó operatív ALADIN adatasszimilációs rendszer legfontosabb jellemzői az 1. táblázatban olvashatóak.
|
Légköri adatasszimilációs séma |
3d-var (három dimenziós variációs asszimiláció) |
|
Felszíni adatasszimilációs séma |
Optimális interopláció |
|
Háttér mező |
Saját (ALADIN) 6 órás előrejelzés |
|
Háttér hibák szimulációja |
Ensemble módszer |
|
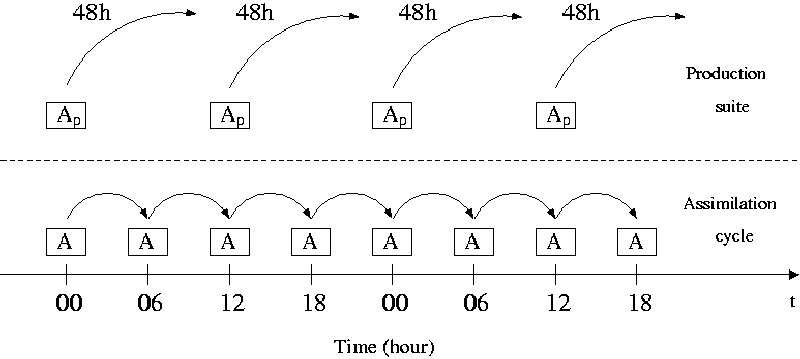
Adatasszimilációs ciklus frekvenciája |
6 óra |
|
Határfeltételek |
1. táblázat: Az ALADIN adatasszimilációs rendszerének legfontosabb karakterisztikái
ALADIN modell adatasszimilációs ciklusa
|
|
Felszíni (szinoptikus) megfigyelések |
Felszíni nyomás, hőmérséklet, relatív nedvesség |
|
|
Rádiószondás (TEMP) megfigyelések |
Nyomás, szél, hőmérséklet, specifikus nedvesség |
 |
Repülőgépes (AMDAR) megfigyelések |
Szél, hőmérséklet |
 |
Műholdas megfigyelések |
AMSU-A, AMSU-B és SEVIRI sugárzási értékek a NOAA, MSG és METOP holdakról, AMV származtatott szél adatok az MSG műholdról |
 |
Wind-profiler megfigyelések |
Szél |


2. táblázat: Az ALADIN adatasszimilációs rendszerben használt megfigyelések
AROME modell adatasszimilációs rendszerének fejlesztése
Az AROME modell saját nagyfelbontású adatasszimilációs rendszere fejlesztés alatt áll. Az AROME 3DVAR rendszer operatív bevezetése 2013 márciusában történt meg konvencionális megfigyelések (felszíni megfigyelések, rádiószondák, repülőgépes megfigyelések) felhasználásával, 3 órás asszimilációs ciklussal. A további fejlesztés fő irányai a következők:
- Az ALADIN adatasszimilációban felhasznált adatok nagyobb térbeli felbontásban való felhasználása: az AROME modellben adatasszimilációs rendszerében minden megfigyelési típust szeretnénk felhasználni, amelyet az ALADIN modellben már operatívan használunk és lehetőleg nagyobb térbeli felbontásban. A megfigyelések felhasználhatóságának határait tervezzük tehát feltárni a térbeli sűrűségre vonatkozóan, amelyet elsősorban a háttér és megfigyelési hibák korrelációs függvényei határoznak meg.
- Új, nagyfelbontású, aszinoptikus megfigyelések asszimilációja: az AROME nagy felbontású előrejelzéseit nagy kihívás kezdeti feltételekkel ellátni, hiszen ez megköveteli, hogy a bemenő megfigyelési adatok is nagy felbontásban kerüljenek felhasználásra. Tovább nehezíti a helyzetet, hogy a 3 órás AROME adatasszimilációs ciklus aszinoptikus időpontjaiban (03, 09, 15, 21 UTC) nem állnak rendelkezésre hagyományos (rádiószondás és szinoptikus megfigyelések). A fentiek, olyan megfigyelési típusok felhasználását teszik szükségessé, amelyek távérzékelés révén nagy felbontásúak, illetve aszinoptikus időpontokban is rendelkezésre állnak. Ilyen megfigyelések jelenleg a radar (reflektivitás és szél), a GPS és bizonyos műholdas adatok, tehát ezek figyelembevétele szerepel az AROME adatasszimilációval kapcsolatos terveinkben.
Irodalomjegyzék
- Adamcsek E., Bölöni G., Csomós P. és Horányi A., 2010: Application of the Ensemble Transform Kalman Filter technique at the Hungarian Meteorological Service: Preliminary results, Időjárás, 114, pp 21-39
- Bölöni G., 2006: Development of a variational data assimilation system for a limited area model at the Hungarian Meteorological Service. Időjárás, 110, pp 309-327.
- Bölöni G. és Horvath K., 2010: Diagnosis and tuning of background error statistics in a variational data assimilation system, Időjárás, 114, pp 1-21.
- Brousseau P., Berre L., Bouttier F., Desroziers G., 2011: Background-error covariances for a convective-scale data-assimilation system: AROME–France 3D-Var, Q. J. R. Meteorol. Soc, 137, 409–422.
- Fischer C., Montmerle T., Berre L., Auger L., Stefanescu S. 2005: An overview of the variational assimilation in the Aladin/France numerical weather prediction system. Tellus, 131, 3477-3492.
- Randriamampianina, R., 2006: Impact of high resolution observations in the ALADIN/HU model. Időjárás, 110, 329-349.
- Randriamampianina R, Iversen T, and Storto A. 2011. Exploring the Assimilation of IASI Radiances in Forecasting Polar Lows. Q. J. R. Meteorol. Soc. 137, 1700–1715
- Storto, A and Randriamampianina, R. 2010, Ensemble variational assimilation for the representation of background-error covariances in a high-latitude regional model, J. Geophys. Res., 115, D17204

